三次元動作解析システムの無料ソフトの使用方法
動画チュートリアル編
(北海道科学大学 保健医療学部 義肢装具学科 )
北海道工業大学:昆 恵介
動作解析システムを使用するための動画チュートリアルです。
クリックすると動画を見ることができます。また右クリックから保存も可能です。
動画はM4Vファイルという圧縮動画にしています。
動画をみるためにはMP4を見れるコーデックがあれば見ることができます。
見れない人はアップル社からi-Tunesをインストールするとみることができます。
1・システム作成変遷
ここで紹介している三次元動作解析システムは無料で配布しています。
ダウンロート等には条件等がありますので、詳細はこちらのページを参考にしてください。
ソフトはMicrosoft−excelのVBAを使用して作られたプログラムです。
TOYBOXは早稲田医療のPO科の卒業制作として当時、管理人が研究指導をして
当時、まだ学生だった野村氏が作成しました。現在は義肢装具の大手の営業マンとして
活躍しながら、非常勤講師としても孤軍奮闘中のノムさんが作りました。
また、walkgraphは管理人が作成しております。これもまた、プログラム作成に関してはまったくの
素人の管理人が非常に重いソフトを当時、作成し、解析ボタンを押してから結果がでるまで
4分かかっていました。パソコンのベンチマークとして使っている人もいましたね。。当時は・・・
3分30秒くらいのところでエラーがでると、もう涙でした。。。そんな中で、なんとか
今のバージョンが完成しております。SEのノムさんには感謝ばかりです。
きっと、最新版のバージョンはノムさんによって生み出されるとかと思います。
投げやりですか?それって。。。
A: ToyboxWGの操作前の準備編
A-1.toyboxを使用する前の準備1(画像変換)
(↑右クリックして対象をファイルに保存でダウンロード)
デジタルビデオカメラで撮影した動画はaviファイルなどのはずです。
この動画ファイルをなんらかの方法で静止画に変換する作業が必要です。
ここでは、私がいつも行っているフリーソフトを使用した方法を紹介します。
フリーソフトはavi2stillというフリーソフトがお勧めです。
走査線を分解して、最大60Hzまで分解することができます。
歩行分析では60Hzによる分析が一般的であるため、このソフトが
協力にサポートしてくれます。

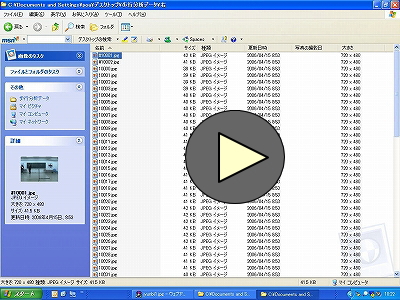
A-2.toyboxを使用する前の準備2(ファイル名変換作業)
(↑右クリックして対象をファイルに保存でダウンロード)
動画データを静止画データに分解した後は、ファイル名の変換作業をします。
使用する動画データは
1)キャリブレーション静止画(動画から静止画へ変換してから)と
2)静止立位時の静止画(動画からの変換)
3)歩行を分解した静止画(歩行動画から静止画への60Hz分解)
これらのファイルを規則性を持たせて、並び替えます。
先頭のファイルは#をつけて
#○○0001.jpg
などとします。これはキャリブレーション治具を撮影した静止画です。
つぎに
#●●0002.jpg
とします。これは静止立位時の静止画です。
そのあとは連番で、歩行データが続きます。
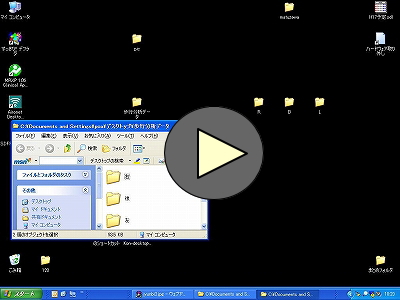
A-3.toyboxを使用する前の準備3(サブフォルダの作成)
(↑右クリックして対象をファイルに保存でダウンロード)
静止画に分解したならば、フォルダをまとめます。たとえば歩行データでも
速い歩行を計測したらトップのフォルダ名を
「速い歩行」
などのファイル名で作成します。
そのフォルダの中に、各カメラ(最大4台)の方向を示すフォルダ名を
付けます。例えば右、左、前、後などです。
そのサブフォルダの中には、それぞれキャリブレーションデータや
歩行データなどがあります。
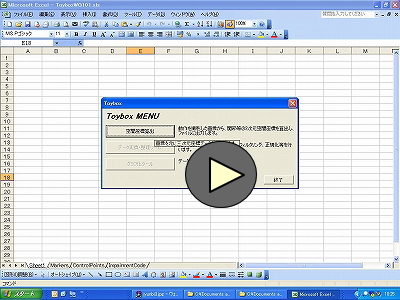
B: ToyboxWGの操作説明編
B-1.toyboxを使用する(初期設定)
(↑右クリックして対象をファイルに保存でダウンロード)
最初にサンプリング周波数の設定(30フレーム、60フレーム)など
や歩行データが入っているフォルダ名を指定する作業が必要です。
B-2.toyboxを使用する2(キャリブレーション)
(↑右クリックして対象をファイルに保存でダウンロード)
カメラキャリブレーションとは、画面上の距離を実寸値に変換するための
情報を教え込む作業です。例では90cmの棒を使用しています。
画面上ではピクセルというPCの単位で計算されます。これを
比で計算するための情報とします。また、三次元空間座標の座標系を
同時に定義します。歩行分析では進行方向をy軸、それと直交する軸を
x軸、高さをz軸としています。

B-3.toyboxを使用する3(画像の同期)
(↑右クリックして対象をファイルに保存でダウンロード)
カメラ撮影した映像を同期させます。同期をとる手段を
ランプの消滅などを利用する人もいますが、ここでは
踵設置の瞬間などをわかりやすい動作で同期をとることが簡便です。
完璧な同期は不可能で、最大で1/120秒のずれが発生する
可能性があります。

B-4.toyboxを使用する4(静止立位のデジタイズ作業)
(↑右クリックして対象をファイルに保存でダウンロード)
静止立位時のマーキングポイントにクリックして、位置座標を教え込みます。
撮影したカメラ分だけこの作業が必要です。

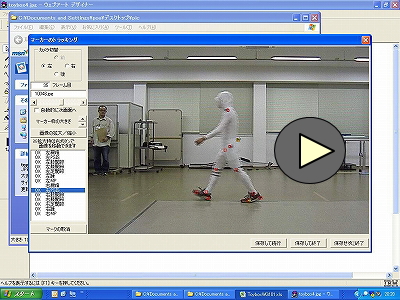
B-5.toyboxを使用する5(歩行データののデジタイズ作業)
(↑右クリックして対象をファイルに保存でダウンロード)
歩行中のマーキングポイントにクリックして、位置座標を教え込みます。
撮影したカメラ分だけこの作業が必要です。またこの作業が最も過酷な
通称
点うち作業
と呼ばれるデジタイズ作業を行います。またの名をトラッキング作業ともいいます。
とにかくコンピュータ上に、肩関節はここです!!と
クリックしながら教えこむ必要があります。この作業でデータの善し悪しが
変わるといっても過言ではないでしょう。
B-6.toyboxを使用する6(三次元空間座標の算出)
(↑右クリックして対象をファイルに保存でダウンロード)
すべての方向からデジタイズが完了したなら、空間座標に変換
します。ここで作成されるのは
静止立位時の三次元空間座標(X,Y,Z)
左右の歩行時の三次元空間座標(X,Y,Z)
が出力されます。適当なファイル名をつけて保存します。
C: walk-graphの操作説明編
C-1.walk-graph1を使用する(初期設定)
(↑右クリックして対象をファイルに保存でダウンロード)
Toyboxで生成された空間座標のファイルを読み込み、
時間因子を指定し、解析ボタンをそれぞれ押していくと
グラフが作成されていきます。

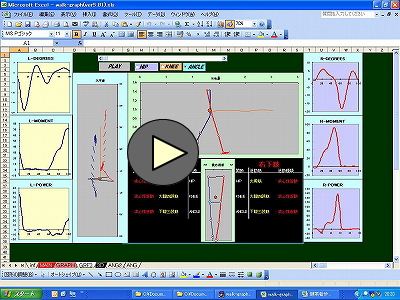
C-2.walk-graph2を使用する(解析編)
(↑右クリックして対象をファイルに保存でダウンロード)
ここまでくると、あとは解析だけです。
角度やモーメント、重心計算やスティックピクチャーなどを
みることができ、またレポートとして印刷することもできます。
グラフの解釈は専門書をごらんください。
たとえば、下のような文献を参考にするとよいかもしれません。
(土屋和夫 監修/臨床歩行分析研究会 編:臨床歩行分析入門、医歯薬出版)
TOPに戻る